Clase #5
Recta determinada por dos planosSe halla teniendo las ecuaciones de dichos planos.

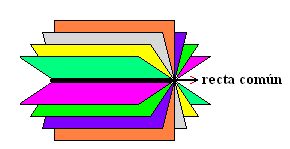
Ecuación del haz de los planos Es el conjunto de planos que pasa por una misma recta.

Angulo entre dos planos

Para hallar dicha ecuación, solo se necesita conocer las coordenadas del centro de la superficie esférica, además de su radio, y se podrá plantear la ecuación de la siguiente manera:

Cilindros y superficies cuadráticas


Clase #6
Análisis gráficos de superficies
1.- Intersección de la superficie con los ejes coordenados
Sea con el eje OX, OY, o OZ.

2.-Intersección de la superficie con los planos coordenados
Sea el plano XOY, XOZ o YOZ.

3.-Intersección de la superficie con los planos paralelos a los ejes coordenado

4.-Bosquejo de la gráfica de la superficie
Dependiendo de los pasos 2 y 3 determinamos la posible superficie que puede generarse para el bosquejo
Ejemplos:

Clase #7
Funciones vectoriales
Funciones Vectoriales de variable real.
Las funciones vectoriales, también conocidas con el nombre de funciones valoradas vectoriales, son funciones matemáticas cuyo dominio es un conjunto de números reales y su rango es un conjunto infinito de vectores dimensionales. La notación convencional para tal función es,
f: Rꓥn → Rꓥm
f=(f1,f2,f3,f4....Fm)
Dominio:

Rango:
Decimos que una función es vectorial cuando tiene la forma:

Operaciones con funciones vectoriales
Si se tiene la funcion F y G

Funciones de varias variables: En la función dada por z = f(x,y); x y y son las variables independientes y z es la variable dependiente.
Pueden darse definiciones similares para las funciones de tres, cuatro o n variables donde los dominios consisten en tríadas (x1, x2, x3), tétradas (x1, x2, x3, x4) y adas (x1, x2, . . ., xn).
Graficas y Curvas de nivel
Se define:
El límite de una función vectorial se define mediante los límites de sus funciones componentes, suponiendo que estos existan.

Los límites de funciones vectoriales siguen las mismas reglas que los límites de funciones escalares de una variable real.
Continuidad
La continuidad de una función vectorial se define de manera similar a la continuidad de una función escalar.

Se prueba fácilmente que r(t) es continua en to si y sólo si todas sus funciones componentes son continuas en to.
Derivación

Una función vectorial es derivable si cada una de sus componentes lo es.
Las propiedades y reglas de derivación de las funciones vectoriales son las mismas que las funciones reales de una variable.Integración
La integral definida de una función vectorial continua se define de forma similar a la integral de una función con valores reales, pero teniendo en cuenta que ahora el resultado es un vector.

F'(to) se considera el vector tangente c en to. F'(to) = V(to), vector velocidad, el modulo de F'(to) representa la velocidad escalar.
El vector F'(to), cuando es diferente de cero determina la recta tangente a la recta tangente a la curva c: L = {F(to) + t.F(to); para todo t elemento de los reales}.

Integración de Funciones Vectoriales:

Longitud de curva y Arco de curva:


Un círculo de radio l/ k es formado por la recta en caso que tenga la misma curvatura en todos sus puntos.En cada uno de los puntos la curvatura puede ser calculada como:

Curvatura de flexión:


Curvatura de torsión


Radio de curvatura


El límite de una función vectorial se define mediante los límites de sus funciones componentes, suponiendo que estos existan.

Los límites de funciones vectoriales siguen las mismas reglas que los límites de funciones escalares de una variable real.
Continuidad
La continuidad de una función vectorial se define de manera similar a la continuidad de una función escalar.

Se prueba fácilmente que r(t) es continua en to si y sólo si todas sus funciones componentes son continuas en to.
Derivación

Observaciones:
Una función vectorial es derivable si cada una de sus componentes lo es.
Las propiedades y reglas de derivación de las funciones vectoriales son las mismas que las funciones reales de una variable.Integración
La integral definida de una función vectorial continua se define de forma similar a la integral de una función con valores reales, pero teniendo en cuenta que ahora el resultado es un vector.

Clase #9
Interpretación física de la derivada:
F'(to) se considera el vector tangente c en to. F'(to) = V(to), vector velocidad, el modulo de F'(to) representa la velocidad escalar.
El vector F'(to), cuando es diferente de cero determina la recta tangente a la recta tangente a la curva c: L = {F(to) + t.F(to); para todo t elemento de los reales}.
Integración de Funciones Vectoriales:
Longitud de curva y Arco de curva:

Curvatura
Vector CurvaturaUn círculo de radio l/ k es formado por la recta en caso que tenga la misma curvatura en todos sus puntos.En cada uno de los puntos la curvatura puede ser calculada como:
Curvatura de flexión:
Curvatura de torsión
Radio de curvatura

Clase #10
Funciones de varias Variables
Funciones de varias variables: En la función dada por z = f(x,y); x y y son las variables independientes y z es la variable dependiente.
Pueden darse definiciones similares para las funciones de tres, cuatro o n variables donde los dominios consisten en tríadas (x1, x2, x3), tétradas (x1, x2, x3, x4) y adas (x1, x2, . . ., xn).
En todos los casos, el rango es un conjunto de números reales.
Para comprender cual es el dominio de la función es necesario (siempre que sea posible) realizar los siguientes puntos.
Análisis matemático: Encontrar los puntos asintóticos donde la función no está definida.
Análisis gráfico: En caso de ser posible se debe graficar el dominio de la función.
Análisis descriptivo: En caso de ser posible, expresar con palabras lo encontrado anteriormente.
Para comprender cual es el dominio de la función es necesario (siempre que sea posible) realizar los siguientes puntos.
Análisis matemático: Encontrar los puntos asintóticos donde la función no está definida.
Análisis gráfico: En caso de ser posible se debe graficar el dominio de la función.
Análisis descriptivo: En caso de ser posible, expresar con palabras lo encontrado anteriormente.
Graficas y Curvas de nivel
Si f es una función de dos variables con dominio D, entonces la gráfica de f es el conjunto de todos los puntos (x,y,z), tal que z=f(x,y) y (x,y) está en el dominio. La gráfica es una superficie en R3.

Curvas de nivel
Las curvas de nivel de una función f de dos variables son las curvas cuyas ecuaciones son f(x,y)=k,
Donde k es una constante.


Ecuación del plano osculador (PO): B1(X - Xo) + B2(Y - Yo) + B3(Z - Zo) = 0

Ecuación del plano osculador (PO): B1(X - Xo) + B2(Y - Yo) + B3(Z - Zo) = 0
Ecuación del plano normal (PNP): T1(X - Xo) + T2(Y - Yo) + T3(Z - Zo) = 0
Ecuación del plano rectificador (PR): N1(X - Xo) + N2(Y - Yo) + N3(Z - Zo) = 0
Ecuación recta tangente (RT): (X - Xo)/T1 = (Y - Yo)/T2 = (Z - Zo)/T3
Ecuación recta binormal (RB): (X - Xo)/ B1 = (Y - Yo)/ B2 = (Z - Zo)/ B3
Ecuación recta normal principal (RNP): (X - Xo)/ N1 = (Y - Yo)/ N2 = (Z - Zo)/ N3
Los vectores son perpendiculares entre si y forman planos perpendiculares el pano de inicio

Consideremos una funci´on arbitraria f : R m → R n con dominio D(f) = D.
Sean S ⊂ D, −→x0 ∈ R m, −→y0 ∈ R n .
Diremos que lim x→x0 x∈S f(x) = y0
(en palabras, el limite de f en →x0 a lo largo de S es igual a→y0),
cuando ∀ε > 0, ∃δ > 0 : f(x) ∈ B(y0, ε), ∀x ∈ (B(x0, δ) \ {x0}) ∩ S.
Equivalentes a este enunciado son los siguientes:
∀ε > 0, ∃δ > 0 : f (B(x0, δ) \ {x0}) ∩ S ⊂ B(y0, ε); ∀ε > 0, ∃δ > 0 : 0 < kx − x0k < δ, x ∈ S =⇒ kf(x) − y0k < ε
Decimos que una funcion f : R
m → R
n
con dominio D es continua en un punto →x0 ∈ D
Cuando ∀ε > 0, ∃δ > 0 : f(x) ∈ B(f(x0), ε), ∀x ∈ B(x0, δ) ∩ D, condicion equivalente a cualquiera de las siguientes: ∀ε > 0, ∃δ > 0 : f B(x0, δ) ∩ D ⊂ B f(x0), ε ; ∀ε > 0, ∃δ > 0 : kx − x0k < δ, x ∈ D =⇒ kf(x) − f(x0)k < ε. Si x0 ∈ D0 ,
lo anterior implica que lim x→x0
x∈D f(x) = f(x0).
Teorema 2 (Continuidad de la funci´on compuesta.) Sean f : R m → R n , g : R n → R p funciones arbitrarias. Si f es continua en −→x0 y g es continua en −−−→ f(x0), entonces g ◦ f es continua en −→x0.
Teorema 3 (Continuidad de las operaciones algebraicas.) Sean f : R m → R n y g : R m → R n funciones continuas en −→x0. Entonces f + g, λf, f · g y kfk son continuas en −→x0.
Teorema 4. Si fk : R m → R (1 ≤ k ≤ n) son las componentes de f : R m → R n , entonces f es continua en →x0 si y solo si cada f(k) es continua en →x0. Este resultado permite simplificar el estudio de la continuidad de una funci´on al de la continuidad de n funciones reales.
Definimos tambi´en el concepto de continuidad global: decimos que una funcion f : R m → R n es continua en un conjunto A ⊂ R m cuando lo es en todos los puntos del conjunto. Son importantes en este contexto las siguientes propiedades.
Teorema 5. Una funcion f : R m → R n es continua en R m si y solo si f −1 (B) es abierto, para cualquier abierto B ⊂ R n .
Los vectores son perpendiculares entre si y forman planos perpendiculares el pano de inicio

Clase #11
Limites y continuidad de las funciones de 2 o mas variables
Limite de una función de varias variables
Consideremos una funci´on arbitraria f : R m → R n con dominio D(f) = D.
Sean S ⊂ D, −→x0 ∈ R m, −→y0 ∈ R n .
Diremos que lim x→x0 x∈S f(x) = y0
(en palabras, el limite de f en →x0 a lo largo de S es igual a→y0),
cuando ∀ε > 0, ∃δ > 0 : f(x) ∈ B(y0, ε), ∀x ∈ (B(x0, δ) \ {x0}) ∩ S.
Equivalentes a este enunciado son los siguientes:
∀ε > 0, ∃δ > 0 : f (B(x0, δ) \ {x0}) ∩ S ⊂ B(y0, ε); ∀ε > 0, ∃δ > 0 : 0 < kx − x0k < δ, x ∈ S =⇒ kf(x) − y0k < ε
Continuidad de una función de varias variables
Cuando ∀ε > 0, ∃δ > 0 : f(x) ∈ B(f(x0), ε), ∀x ∈ B(x0, δ) ∩ D, condicion equivalente a cualquiera de las siguientes: ∀ε > 0, ∃δ > 0 : f B(x0, δ) ∩ D ⊂ B f(x0), ε ; ∀ε > 0, ∃δ > 0 : kx − x0k < δ, x ∈ D =⇒ kf(x) − f(x0)k < ε. Si x0 ∈ D0 ,
lo anterior implica que lim x→x0
x∈D f(x) = f(x0).
Para un mejor entendimiento del tema les dejo este video de análisis de continuidad
Existen teoremas para la continuidad de las funciones
Teorema 1 (Caracterizaci´on por sucesiones.) Sea f : D ⊂ R m → R n y −→x0 ∈ D. Entonces f es continua en −→x0 si y s´olo si ∀{xn}n≥1 ⊂ D, xn → x0 =⇒ f(xn) → f(x0), es decir lim n→∞ f(xn) = f( l´ımn→∞ xn).Teorema 2 (Continuidad de la funci´on compuesta.) Sean f : R m → R n , g : R n → R p funciones arbitrarias. Si f es continua en −→x0 y g es continua en −−−→ f(x0), entonces g ◦ f es continua en −→x0.
Teorema 3 (Continuidad de las operaciones algebraicas.) Sean f : R m → R n y g : R m → R n funciones continuas en −→x0. Entonces f + g, λf, f · g y kfk son continuas en −→x0.
Teorema 4. Si fk : R m → R (1 ≤ k ≤ n) son las componentes de f : R m → R n , entonces f es continua en →x0 si y solo si cada f(k) es continua en →x0. Este resultado permite simplificar el estudio de la continuidad de una funci´on al de la continuidad de n funciones reales.
Definimos tambi´en el concepto de continuidad global: decimos que una funcion f : R m → R n es continua en un conjunto A ⊂ R m cuando lo es en todos los puntos del conjunto. Son importantes en este contexto las siguientes propiedades.
Teorema 5. Una funcion f : R m → R n es continua en R m si y solo si f −1 (B) es abierto, para cualquier abierto B ⊂ R n .
No hay comentarios.:
Publicar un comentario